控制|深度学习在控制领域的四类应用
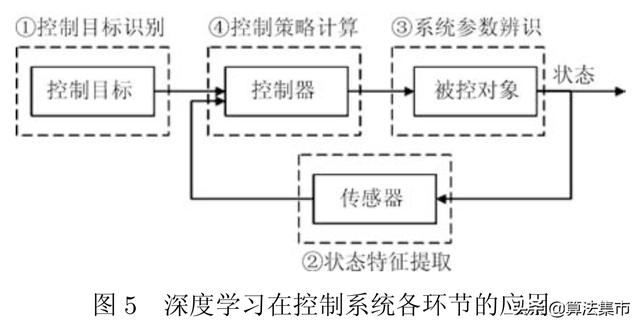
深度学习在控制领域的研究已初见端倪 , 目前的研究主要集中在:
- 控制目标识别
- 状态特征提取
- 系统参数辨识
- 控制策略计算
 文章插图
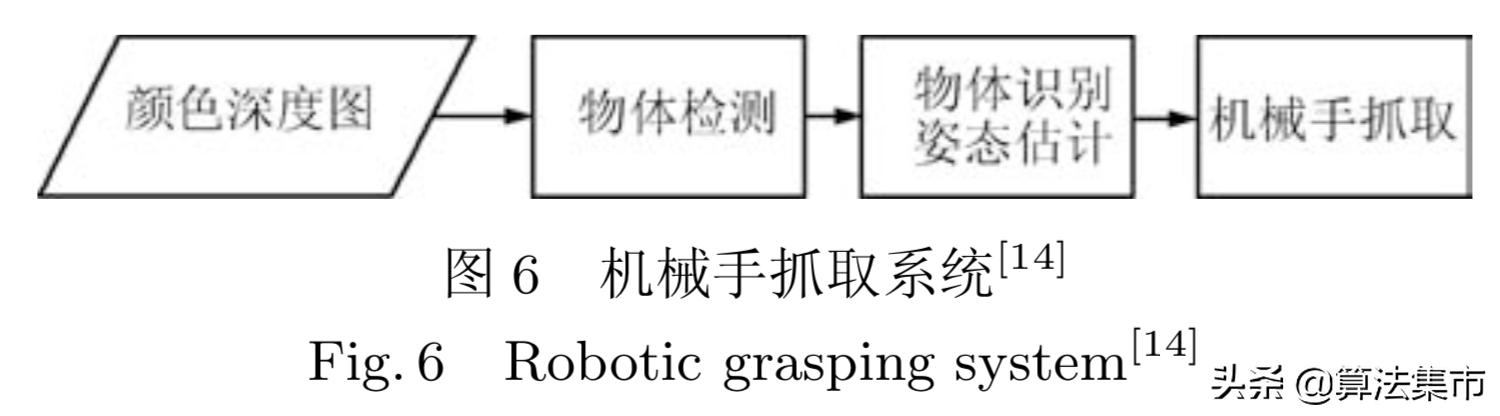
文章插图1、控制目标识别在传统的控制系统中 , 控制目标一般以给定量的形式直接给出 , 而在智能控制系统中 , 控制目标有时并不明确或不能直接得到 。 比如在机械手抓取系统中 , 系统首先需要检测被抓取物的位置 , 识别并估计其姿态以确定机械手需要达到的位置和角度 。
下图显示了机械手抓取系统的流程 。 输入数据时颜色深度图 , 在物体检测过程中 , 系统利用前景背景分割技术检测出物体位置 , 然后从图片中分割出包含物体的统一大小图片 。 在物体识别和姿态估计过程中 , 获取的统一大小图片输入CNN网络 , 经过前向计算在网络输出端获得物体的相关信息 , 包含物体的种类和姿态 。 最后机械手按照规划的路径到达物体上访 , 调整夹持器的姿态 , 使其符合物体的姿态 , 然后执行抓取动作 。
 文章插图
文章插图在这个系统中 , 机械手抓取之前需要达到的姿态为控制目标 , 采用深度学习进行物体识别实质上在控制系统中起到了控制目标识别的作用 。
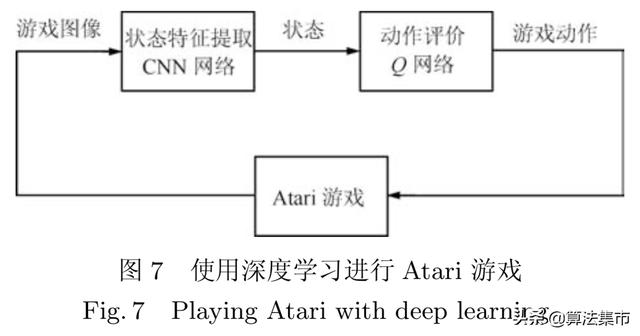
2、状态特征提取【控制|深度学习在控制领域的四类应用】现代控制理论引入了状态空间的概念 , 以系统的状态为基础进行分析与综合 。 在基于视觉的控制系统中 , 系统状态由图片体现 , 其维度高 , 不容易进行人工特征抽取 , 不利于系统的分析综合与控制 。 而深度学习十分适合对图片数据进行降维与特征抽取 , 所以深度学习在基于视觉的控制系统中研究较多 。
 文章插图
文章插图深度学习多与强化学习方法结合 , 使得系统能够根据深度学习提取的特征给出控制策略 。
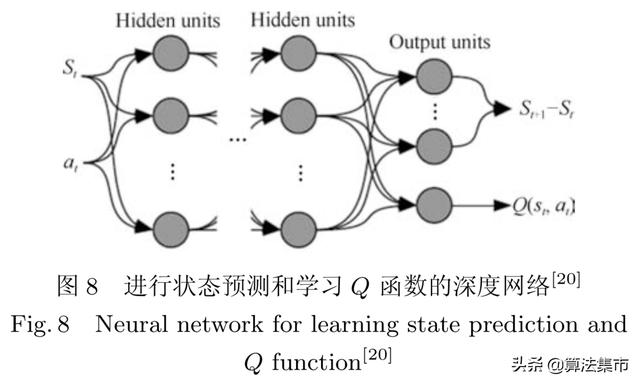
3、系统参数辨识系统辨识是现代控制理论的重要研究内容 , 它根据系统输入输出来确定描述系统的模型 。 对于复杂的非线性动态系统 , 其模型难以用线性函数或根据先验知识建立 。 而神经网络具有拟合复杂非线性函数的能力 , 可以用于系统辨识 。
但浅层神经网络在训练中容易受到局部最优等问题的影响 , 有时并不能准确描述动态系统 。 深度学习的发展给解决这一问题带来了启发 。 由于系统模型由深度神经网络代替 , 系统辨识任务就转成深度神经网络的参数优化 。
使用深度学习进行系统参数辨识的控制系统一般涉及模型预测控制 。 模型预测控制的主要思想是在每个时刻基于系统当前状态和预测模型 , 计算出系统未来一段时间的最优控制序列 , 并执行序列的首个控制策略 。 其中预测模型使用深度学习实现 , 比如直升机动态模型使用深度ReLU网络模型拟合 , 主要思想是利用历史一段时间的数据预测未来时刻的加速度 。
4、控制策略计算在单输出控制系统中 , 控制策略指的是单一的控制量 , 而在智能控制系统中 , 控制策略除了指单一控制量之外 , 也可以指一串动作或一个决策 。
对于传统控制器而言 , 需要获取给定量和系统输出之间的差 , 从而计算控制策略 。 对于现代控制系统 , 控制器获取系统状态进行控制策略计算 。 经典的PID控制从系统机理出发设计控制器 , 而深度神经网络是一个需要监督信号进行训练的模型 。 所以深度学习在控制策略计算方面的研究也主要集中在有监督信号的情形 。
 文章插图
文章插图需要注意的是 , 深度学习用于控制系统中的理论研究仍然欠缺 , 目前没有理论能够评估使用了深度学习的控制系统在稳、准、快等方面的性能 。 虽然深度学习在控制系统中能够表现出一定的控制效果 , 但是仅仅通过试错等方式不能保证控制性能 , 因此这方面理论上的欠缺可能会阻碍深度学习在控制系统中的研究发展 。
 文章插图
文章插图参考资料:
段艳杰, 吕宜生, 张杰, et al. 深度学习在控制领域的研究现状与展望[J]. 自动化学报, 42(5).
- 深度|iPhone12到底值得买吗 深度体验一周我发现了这些
- 车轮旋转|牵引力控制系统是如何工作的?它有什么作用?
- 控制|正弦电气科创板IPO过会,需说明与前员工设立或控制的经销商交易的原因及合理性
- 智慧城市|被汽车物联网控制的未来,这是我们向往的新生活吗?
- 采用|iPhone12mini和iPhone7深度对比:值得升级吗
- 设计|未来创意拒绝被垄断:欧拉共创成果深度解读!
- X50|vivo X50 Pro+深度测评:全能影像机皇登场
- 广度|华住创始人季琦:深度重要于广度
- 用于|用于半监督学习的图随机神经网络
- Twitter|Twitter的Audio Spaces测试包括转录、扬声器控制和报告功能