吉林大学TARS-GO战队视觉代码
介绍本代码是吉林大学TARS-GO战队Robomaster2020赛季步兵视觉算法 , 主要模块分为装甲板识别、大风车能量机关识别、角度解算、相机驱动及串口/CAN通信 。
1.功能介绍
- 装甲板识别 ,检测敌方机器人装甲板位置信息并识别其数字
- 大风车能量机关识别 ,检测待激活大风车扇叶目标位置信息
- 角度解算, 根据上述位置信息解算目标相对枪管的yaw、pitch角度及距离
- 相机驱动 ,大恒相机SDK封装 , 实现相机参数控制及图像采集
- 串口/CAN通信 ,与下位机通信 , 传输机器人姿态信息及操作手反馈视觉的控制信息
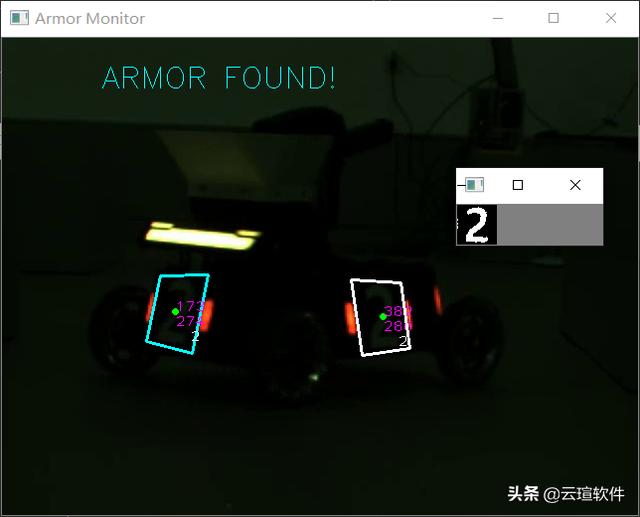
**EnemyColor = BLUE; TargetNum = 1**
 文章插图
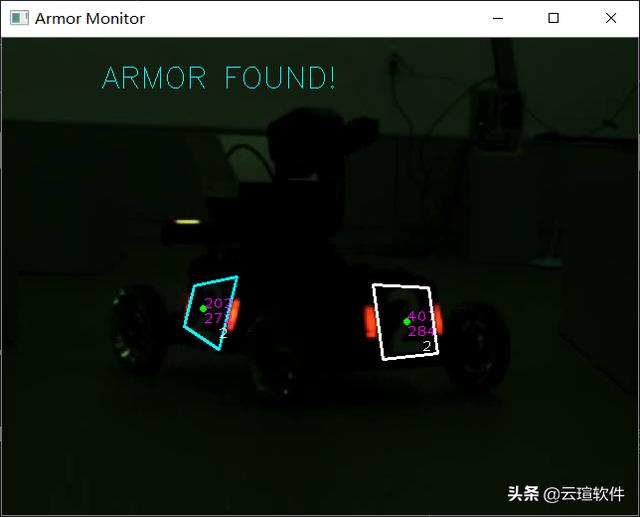
文章插图**EnemyColor = RED; TargetNum = 2**
 文章插图
文章插图在640*480图像分辨率下 , 装甲板识别帧率可达340fps左右 , 引入ROI之后可达420fps 。 但考虑到识别帧率对于电控机械延迟的饱和 , 取消引入ROI操作 , 以此避免引入ROI之后无法及时探测全局视野情况的问题 , 加快机器人自瞄响应 。
**640\*480(峰值可达340FPS)**
 文章插图
文章插图**320\*240(峰值可达1400FPS)**
 文章插图
文章插图装甲板数字识别采用SVM , 通过装甲板位置信息裁剪二值化后的装甲板图像并透射变换 , 投入训练好的SVM模型中识别 , 数字识别准确率可达98% 。
 文章插图
文章插图大风车能量机关识别
 文章插图
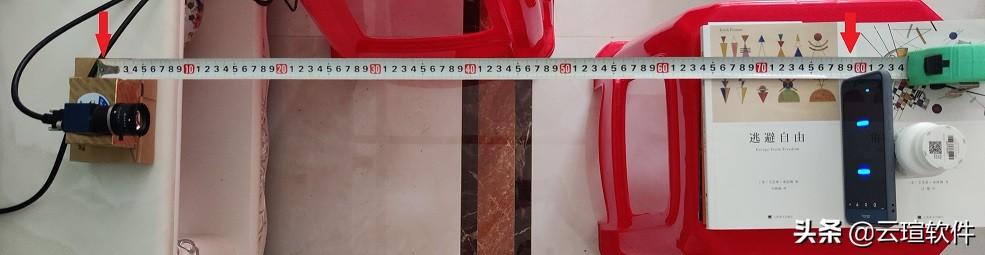
文章插图角度解算角度解算方面使用了两种解算方法分距离挡位运行 。 第一档使用P4P算法 , 第二档使用小孔成像原理的PinHole算法 。 此外还引入了相机-枪口的Y轴距离补偿及重力补偿 。 使用标定板测试 , 角度解算计算的距离误差在10%以内 , 角度基本与实际吻合 。
 文章插图
文章插图 文章插图
文章插图/** *@brief: detect and delete error armor which is caused by the single lightBar 针对游离灯条导致的错误装甲板进行检测和删除 */void eraseErrorRepeatArmor(vectorvector::iterator it = armors.begin(); for (size_t i = 0; i < length; i++)for (size_t j = i + 1; j < length; j++){if (armors[i].l_index == armors[j].l_index ||armors[i].l_index == armors[j].r_index ||armors[i].r_index == armors[j].l_index ||armors[i].r_index == armors[j].r_index){armors[i].getDeviationAngle() > armors[j].getDeviationAngle() ? armors.erase(it + i) : armors.erase(it + j);}}}- 装甲板数字识别匹配好装甲板后 , 利用装甲板的顶点在原图的二值图(原图的灰度二值图)中剪切装甲板图 , 使用透射变换将装甲板图变换为SVM模型所需的Size , 随后投入SVM识别装甲板数字 。
 文章插图
文章插图- 目标装甲板选取对上述各项装甲板信息(顶点中心点坐标与枪口锚点距离、面积大小、装甲板数字及其是否与操作手设定匹配)进行加权求和 , 从而获取最佳打击装甲板作为最终的目标装甲板 。
 文章插图
文章插图大风车识别首先对图像进行二值化操作 , 然后进行一定腐蚀和膨胀 , 通过边缘提取和条件限制得出待击打叶片(锤子形) 。 在待击打叶片范围内进一步用类似方法寻找目标装甲板和流动条 , 在二者连线上寻找中心的“R” 。 根据目标装甲板坐标和中心坐标计算极坐标系下的目标角度 , 进而预测待击打点的坐标(小符为装甲板本身 , 大符需要旋转) 。 最后将待击打点坐标和图像中心的差值转换为yaw和pitch轴角度 , 增加一环PID后发送给云台主控板 。
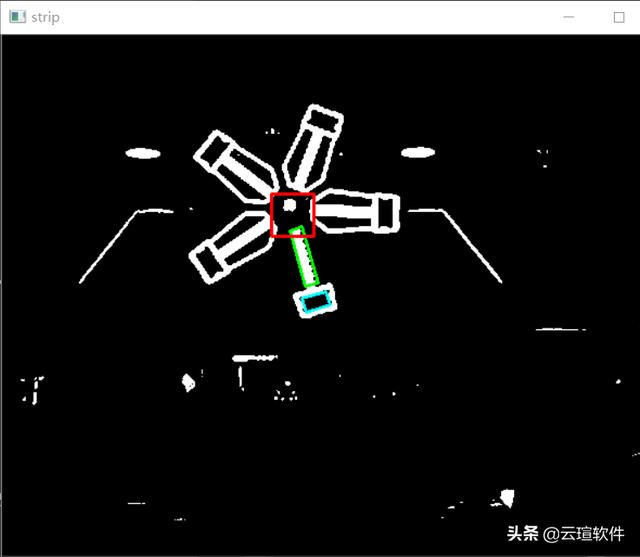 文章插图
文章插图【吉林大学TARS-GO战队视觉代码】
- 出口商品|吉林求变推动跨境电商爆发式增长 外国人“海淘”更方便
- 红米K30S|大学生玩王者荣耀的话,红米Note 9足够吗?
- 荷兰:中国为研究光刻机技术,专门创办芯片大学,“反人类”操作
- 消费|第五届冰雪美食节:美团牵手吉林省商务厅
- 出口|吉林求变推动跨境电商爆发式增长 外国人“海淘”更方便
- 清华大学刘知远:知识指导的自然语言处理
- 获政府2000万澳元助力,阿德莱德大学AI研究将再度腾飞
- 深圳40年40人,为何大疆汪滔没上榜,反而是他大学老师上榜?
- 靠颜值年少出道就能火的女孩,为何还要上大学?良好家庭教育有关
- 荷兰大学不为所动,继续与华为合作