生日快乐ASIMO | 本田机械人“ASIMO”简史
 文章插图
文章插图
你需要知道的ASIMO
“ASIMO”是“Advanced Step in Innovative Mobility” (进阶的创新移动设备);
“ASIMO”是由本田公司设计并开发的类人型机器人;
“ASIMO”的初代型号于2000年10月31日推出 , 旨在用作多功能移动助理;
“ASIMO”的诞生是为了帮助行动不便的人群 , 也在全球的各大演示中出场 , 以鼓励全球各地的科技和数学人才努力钻研 。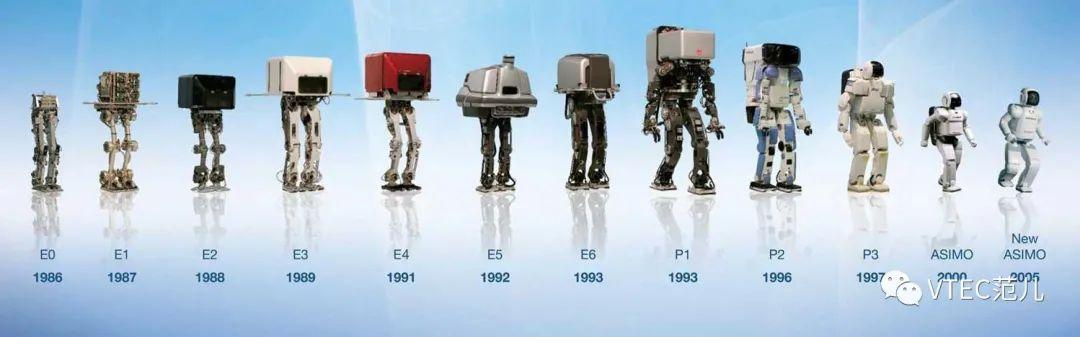 文章插图
文章插图
“ASIMO”的历史:
1986年–静态步行(Static walking)
本田制造的第一台机器人被称为E0 。 E0只有“下半身”而且走得很慢 , 有时需要20秒才能完成一个步骤 , 所以也被称为 “静态步行” 。
在静态行走中 , 机器人开始向前移动一只脚后 , 必须等到其脚上的重量平衡后才能开始向前移动另一只脚 。 但是人类才不会那样走路 , 所以本田的工程师们继续着他们的研究开发 。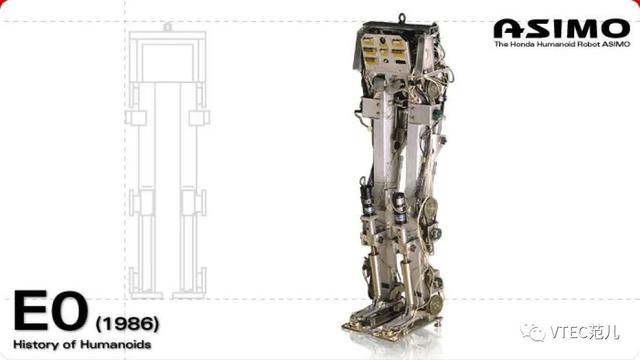 文章插图
文章插图
1987年–动态步行(Dynamic walking)
至此 , 工程师们已经开发出了一种可以执行“动态步行”的方法 , 这种方法更类似人类的行走模式 。借助这种行走技术 , 这台本田机器人(现在称为原型E1 , 随着研究的进展 , E2和E3型号很快就跟进开发出来)能够双脚迈动的同时转移自身的重量 , 以防止向前倾倒 。
它能向前走路了!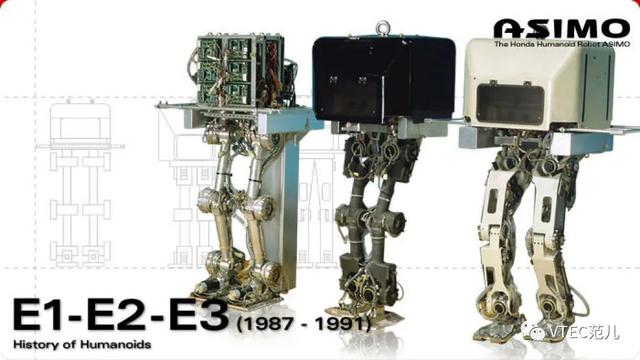 文章插图
文章插图
1991年–如履平地
在E4 , E5和E6原型中 , 本田的工程师完善了行走机构 , 使机器人可以轻松地在斜坡 , 楼梯和崎岖不平的地面上行走 。
但是如果真正想要如人类一样走路 , 实际上需要用到身体 , 手臂和头部相互平衡 , 所以工程师们不得不继续下一步 , 增加“机器半人”身体的其他部分 。 文章插图
文章插图
1993年–类人型的机器人
具有身体 , 胳膊 , 手掌和头部的下一代原型机器人(P1 , P2和P3)看起来更具“人形”(humanoid) 。 P1原型机的身高约188厘米 ,175公斤 。
P2的身高略有缩小 , 但却重达210公斤 。 但是 , 多出的各项传感设备使得P2可以在不平坦的表面上流畅地行走 , 甚至可以抓住指定物品并推动小推车 。 更惊人的是P2甚至在被外力推搡的情况下保持平衡 。
【生日快乐ASIMO | 本田机械人“ASIMO”简史】本代最终型号P3的身高被设定到了更“亲近人类”的157厘米 , 重量达到130公斤 , 行走速度比前辈机型更迅速 , 也更平稳 。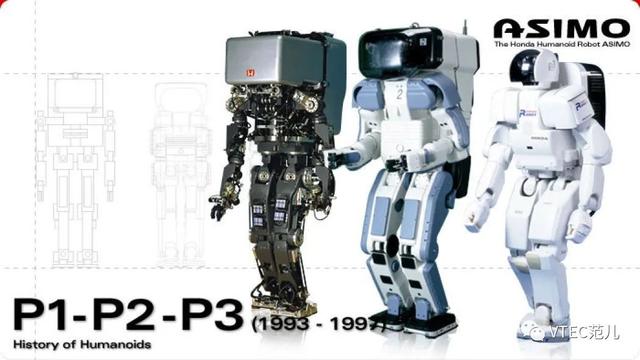 文章插图
文章插图
2000年– ASIMO
对步行系统进行了更多的改进 , 使被取名为“ASIMO”的机器人几乎可以在任何环境中从容优雅地行走 。 精致的髋关节使ASIMO可以平稳地转动 , 而同期其他机器人必须停下来并重新计算才能做到 。
在考虑ASIMO的使用场景时 , 工程师们决定将ASIMO的尺寸进一步减小到122厘米 。 这样的身高不仅对就坐的人群和小朋友们更加友好 。 这个身高也使ASIMO可以在桌面高度和计算机上工作 , 其手臂也能更轻易触及电灯开关并转动门把手 。
ASIMO采用的镁合金机体坚固而轻巧 , 外表由塑料“皮肤”覆盖 , 重量仅为惊人的52公斤 。 被称为“Predicted Movement Control(行动控制预测)”技术使ASIMO能够自动预测其下一个运动并转移其重量 。
与P2和P3必须使用编程的步行模式不同的是 ,ASIMO的步幅也可以实时调整 , 使其行走速度可以快慢自如 。 文章插图
文章插图
2005年–更好 , 更快 , 更强
本田的工程师们进一步改进了ASIMO的运动系统 , 将其行走速度从每小时2.5公里提高到2.7公里 , 并使ASIMO能够以每小时6公里的速度奔跑 。 本田将ASIMO的高度提升到130厘米 , 并增加了一点重量 , 现在净重54公斤 。
工程师将ASIMO的动力能源切换为锂电池 , 使得续航时间比前辈增加了一倍 。 他们还实施了IC卡通讯技术 , 使得ASIMO能够更好的与人互动 。 新的传感器使ASIMO可以牵手与人同步行走 。
2007年-功能性完善
工程师们为ASIMO添加了更多功能 , 可以将两个或多个ASIMO机器人联动在一起并协同工作 。 至此 , ASIMO可以抉择是跨过障碍物还是绕道让路 。
- 字节|阿里巴巴、字节跳动、花生日记获“互联网行业公益奖”
- 酷冷至尊K501L搭配i7 10700打造懒人快乐游戏机
- 百度网盘|百度网盘这个新功能,就是我们想要的“快乐”
- 让学习更舒适,更快乐,乐歌EC2电动升降桌测评
- 有钱人的快乐,你根本想象不到...
- 坐轮椅|“骨折坐轮椅也无法阻止我取快递?”年轻人的快乐就离谱...哈哈哈哈
- 不只“拥有躺赢的快乐”培养“网红”电商主播西藏是认真的
- 代驾|代驾司机兼职跑腿,滴滴能否收获双倍快乐?
- 虽然没多人提这件事,但我还是要说:今天是马化腾生日
- 返佣|花生日记陷困局:违规操作遭监管通报,靠导流返佣难突围