机器人|当机器人拥有痛觉后……
印象中 , 机器人似乎都不惧怕刀山火海 , 它们毫无痛觉 , 简直是妥妥的“工具人” 。 然而近日 , 来自新加坡南洋理工大学(NTU Singapore)的科学家和其合作者在一项突破性研究中 , 采用一种类脑方法 , 帮助机器人具有了识别疼痛并在受损时进行自我修复的能力 。
该系统具有支持 AI 的传感器节点 , 可以处理并响应由物理力施加的压力引起的“疼痛” , 还允许机器人在“受轻伤”时检测并修复自身的损坏 , 而无需人工干预 。 研究论文已在线发表在 Nature 子刊 Nature Communications 上 。 文章插图
文章插图
(来源:Nature Communications)
当传感器网络遇上忆阻晶体管
目前 , 机器人系统通常使用传感器网络来生成有关其周围环境的信息 。 例如 , 灾难救援机器人使用摄像头和麦克风传感器在废墟下寻找幸存者 , 然后在其手臂上的触摸传感器的引导下将受困人员救出 。 在流水线上工作的工厂机器人 , 则使用视觉传感器将机械臂引导到正确的位置 , 并通过触摸传感器来确定“手”上的物体是否在滑移 。
而传感器通常不负责处理信息 , 仅仅将数据发送到发生学习行为的单个、大型、强大的中央处理器(CPU)中 。 因此 , 现有的机器人通常布线繁琐 , 响应时间存在延迟 。 它们还拥有一颗“玻璃心” , 非常容易“受伤” 。
论文作者之一 Arindam Basu 说:“一个值得关注的问题是 , 人类在与机器人共同工作时 , 如何确保机器人能够与我们安全地互动 。 因此 , 世界各地的科学家一直在寻找使机器人具有感知能力的方法 , 比如“感觉”疼痛 , 做出反应并承受恶劣的工作条件 , 但是 , 将众多传感器组合在一起所产生的复杂性和复杂系统本身的脆弱性 , 是传统方法被广泛采用的主要障碍 。 ” 文章插图
文章插图
(来源:新加坡南洋理工大学)
而新的方法将 AI 嵌入到传感器节点网络中 , 从而教会机器人如何识别疼痛并对破坏性的刺激作出反应 。
首先 , 研究团队对忆阻晶体管(memtransistor)进行了创新 , 其功能如同人脑神经元中的多个突触 , 能够使神经网络拥有成千上万的类似连接 。
然后 , 他们将这种忆阻晶体管内置于卫星阈值调整接收器(Satellite Threshold Adjusting Receptors , STARs)中 , 使其成为能够记忆和处理信息的“类脑”电子设备 。 在此系统中 , 它们被作为机器人的 AI 疼痛感受器和突触 。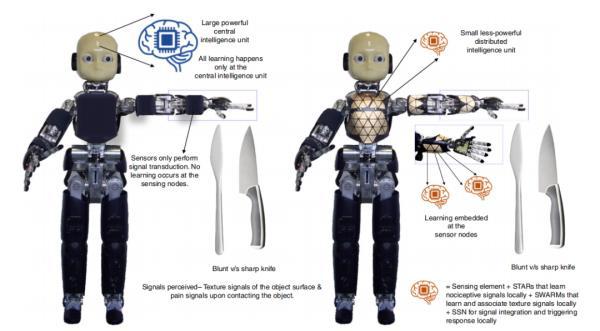 文章插图
文章插图
图|所有的学习都在一个强大的大型中央处理器上进行(左);而在新研究所提出的分散方法中 , 学习行为被嵌入到各个传感器节点中(右)(来源:Nature)
AI 与多个较小的 , 功能较弱的处理单元相连接 , 就像分布在机器人皮肤上的“迷你大脑”一样 。 科学家们表示 , 这意味着学习行为直接在本地进行 , 并且这种机器人的布线要求和响应时间比传统机器人减少了 5-10 倍 。
新一代机器人的法宝:自愈
我们知道 , 传统机器人有一个非常影响工作效率的缺陷 , 即当被锋利的物体划伤时 , 机器人会迅速失去机械功能 , 并且需要人工修复 , 既费时又耗钱 。
而此系统的另一大创新则为弥补该缺陷带来了希望——使用一种可自我修复的离子凝胶材料(ion gel material) 。 该离子凝胶材料的基本理念是将电极、可拉伸的聚合物与离子液体结合在一起 。 离子-偶极子(ion–dipole)相互作用 , 就可以增加聚合物上带电离子和极性基团之间的作用力 , 并且随着离子电荷或分子极性的增加而增加 。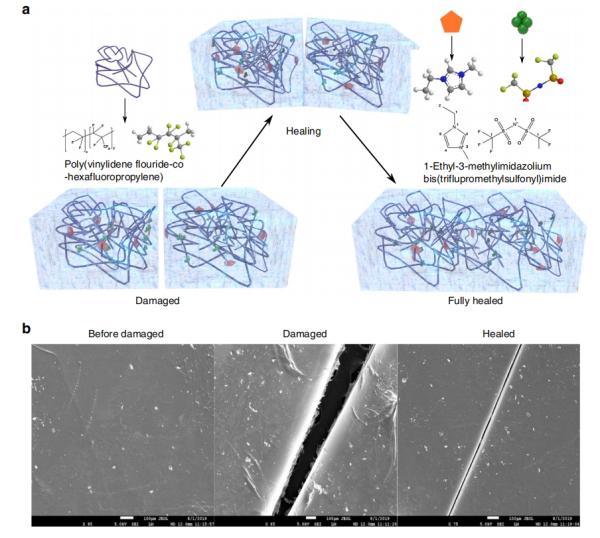 文章插图
文章插图
图 | 在 STARs 和卫星重量调整电阻记忆(SWARMS)中加入自我修复的离子凝胶 , 当受到损伤时 , 它们会自我愈合(a);受到损伤时 , 离子液体包裹体通过塑化机制(扫描电子显微镜[SEM]图像)改善聚合物外壳的热迁移率 , 从而触发自愈过程 (b)(来源:Nature官网)
因此 , 当机器人受到损坏时 , 比如出现划伤或机械破坏 , 则自修复离子凝胶中的分子就会开始相互作用 , 使得机器人将其伤口“缝合”在一起 , 并在保持高响应性的同时重新恢复功能 。
论文作者之一 Rohit Abraham John 说:“这些新型设备的自我修复特性可以帮助机器人系统在划伤或刮伤时 , 即使在室温条件下也能反复将伤口“缝合”起来 。 这类似于我们人类的生物系统运作方式 , 就像人类皮肤能够自行愈合一样 。 ”
- 当初|这是我的第一部华为手机,当初花6799元买的,现在“一文不值”?
- 余额|中兴通讯:现有资金余额仅能确保公司当前经营规模下现金流安全
- 机器人|网络里面的假消息忽悠了非常多的小喷子和小机器人
- 发生|差评遭外卖员上门辱骂拍摄?不给差评是善解人意,不是理所当然!
- 跑腿|机器人“小北”上岗 让办事群众少跑腿
- 机器人|外骨骼康复训练机器人助力下肢运动功能障碍患者康复训练
- Veeam|Veeam让企业数据拥有“第二次生命”
- mini|电影、mini 与「当日完稿」工作流
- 教学|机器人教学的目标方案
- 体验|VR\/AR体验、3D打印、机器人“对决”……松江这所中学人工智能创新实验室真的赞